[헤럴드경제=구본혁 기자] 다리가 4개인 사족 등반 로봇이 초당 70cm의 속도로 빠르게 벽면을 타고 올라간다. 스파이더맨처럼 건물의 벽면을 자유자재로 타고 오르내릴 수 있는 신개념 로봇이 국내 기술로 독자 개발됐다.
한국과학기술원(KAIST)은 기계공학과 박해원 교수 연구팀이 철로 이뤄진 벽면과 천장을 빠른 속도로 이동할 수 있는 사족 등반 로봇을 개발했다고 26일 밝혔다. 이 로봇은 배, 교량, 송전탑, 대형 저장고, 건설 현장 등 대형 구조물에서 사람 대신 점검, 수리, 보수 임무를 수행하는 등 폭넓게 이용될 전망이다.
기존 벽면을 오르는 등반 로봇은 바퀴나 무한궤도를 이용하기 때문에 단차나 요철이 있는 표면에서는 이동성이 제한되는 단점이 있다. 다리가 달린 등반 로봇은 장애물 지형에서의 향상된 이동성을 기대할 수 있으나 이동속도가 현저히 느리거나 다양한 움직임을 수행할 수 없다는 단점이 있었다.
사족 등반 로봇의 빠른 이동을 가능하게 하려면 발바닥은 흡착력이 강하면서도 흡착력을 빠르게 온·오프 스위칭할 수 있어야 한다. 또한 거칠거나 요철이 있는 표면에서도 흡착력의 유지가 필요하다.
연구팀은 문제를 해결하기 위해 새로운 영전자석과 자기유변탄성체를 보행 로봇의 발바닥 디자인에 최초로 적용했다. 영전자석은 짧은 시간의 전류 펄스로 전자기력을 온·오프할 수 있는 자석으로, 자기력의 유지를 위해 에너지가 들지 않는다.
또한 연구팀은 고무와 같은 탄성체에 철가루와 같은 자기응답 인자를 섞어 만든 ‘자기유변탄성체’를 장착해 발바닥의 자기력을 현저히 떨어트리지 않으면서도 마찰력을 높였다. 발바닥 무게는 169g에 불과하지만 약 54.5㎏의 수직흡착력, 45.4㎏의 마찰력을 제공한다.
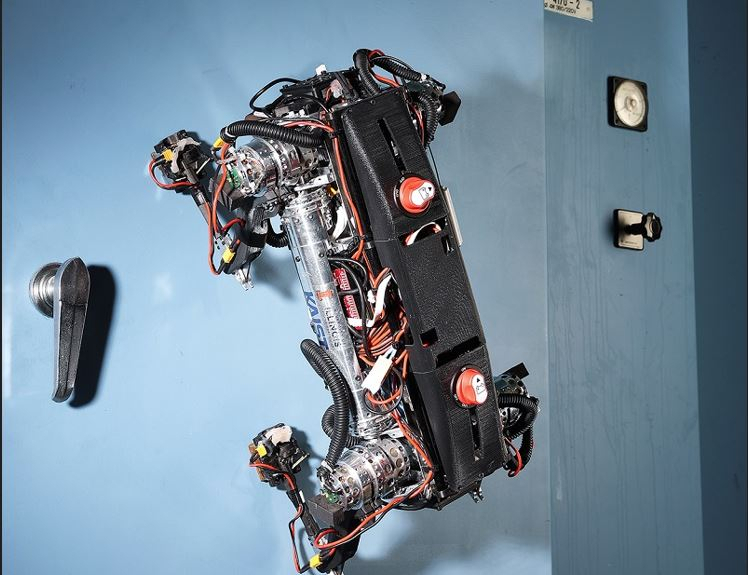
개발한 등반 로봇은 초속 70㎝의 속도로 가파른 벽을 고속 등반했고, 최대 초속 50㎝의 속도로 천장에 거꾸로 매달려 보행할 수 있었다. 이는 등반 로봇으로는 세계 최고의 속도다. 또한 바닥에서 벽으로, 벽에서 천장으로 전환이 가능하고 벽에서 돌출돼 있는 5㎝ 높이의 장애물도 극복할 수 있는 성능을 뽐냈다.
연구팀은 향후 배, 교량, 송전탑, 송유관, 대형 저장고, 건설 현장 등 철로 이뤄진 대형 구조물의 점검, 수리, 보수에 폭넓게 활용될 수 있을 것이라고 설명했다.
엄용 KAIST 기계공학과 박사 과정은 “벽과 천장을 포함한 다양한 환경에서도 로봇이 민첩하게 움직일 수 있음을 증명했다”면서 “조선소와 같은 철제구조물에서 사람 대신 위험하고 힘든 작업을 수행하는 데에 활발히 사용될 수 있을 것”이라고 말했다.
이번 연구결과는 로봇 분야 국제 학술지 ‘사이언스 로보틱스(Science Robotics)’ 12월호 표지논문으로 선정돼 출판됐다.
![“보고도 못 믿겠다” 이마가 퉁퉁…끔찍한 11월 모기 [지구, 뭐래?]](https://wimg.heraldcorp.com/news/cms/2024/11/22/news-p.v1.20241122.4e1107f16d1549f6a605b4b4b2774a49_R.jpg?type=h&h=120)






![[단독] ‘찐천재’ 홍진경, 자양동 건물 30억에 사들였다…50층 아파트 입주권 받는다 [초고가 주택 그들이 사는 세상]](https://wimg.heraldcorp.com/news/cms/2024/11/22/news-p.v1.20241119.4ea21d4b40a74651897186b5c2863f38_T1.png?type=h&h=240)



![연예인에 빠져…“24개월 할부로 사더니” 전부 쓰레기통 행 [지구, 뭐래?]](https://wimg.heraldcorp.com/news/cms/2024/11/20/news-p.v1.20241120.bf9d50d5065347f3ba37696b2898bb31_T1.jpg?type=h&h=240)



![집 너무 안팔리자 아내가 꺼낸 말 “여보, 상가랑 아파트 바꿀까?”[부동산360]](https://wimg.heraldcorp.com/news/cms/2024/11/16/rcv.YNA.20241105.PYH2024110509190001300_T1.jpg?type=h&h=240)




